
Flemming R. Ovesen / Torben Taustrup
Flemming R. Ovesen / Torben Taustrup
Testkørsel
28-06-01
R.A. motordrevet kører
Ved dette møde aftalte vi, at Flemming skulle tage steppermotordriverkredsløbet med, for vi vurderede, at vi kunne få drevet til at køre med softwaren.
Jeg havde nogle dage i forvejen downloaded den seneste version af Mel Bartels styreprogram.
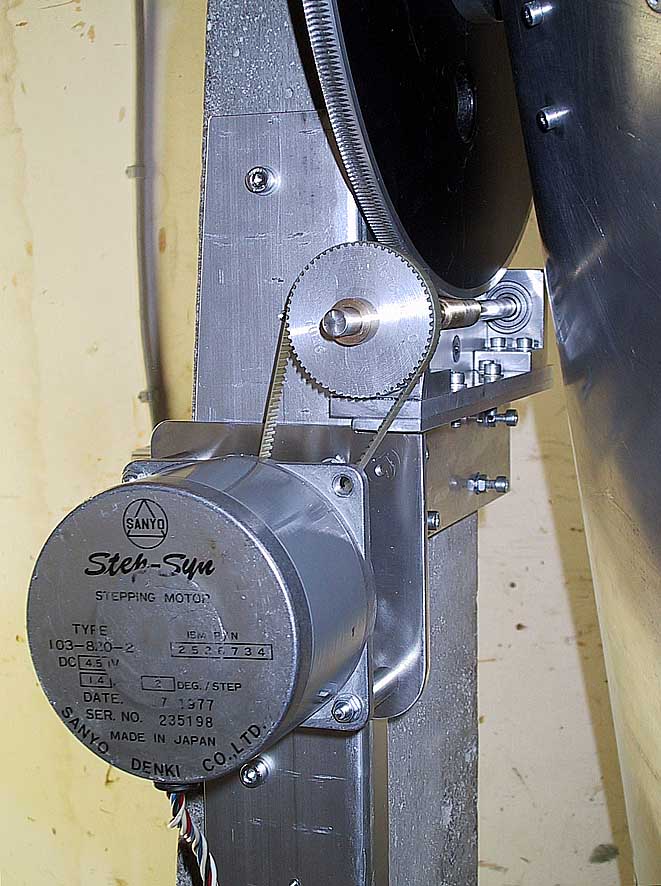
Aftenens øvelse bestod i sin enkelthed i at få sat motoren fast på en 4 mm tyk aluminiumsplade, så der skulle bare afsaves fire 30 mm lange rørstykker der sammen med fire 6 mm skruer kunne danne motorstag. Rørstykkerne i rustfrit stål blev drejet af i drejebænken så de havde den samme længde.
Pudsigt nok var flangehullerne i motoren lige i den rigtige størrelse til et 6 mm gevind så det fik vi lavet i en fart med tappen i boremaskinen.
Det blev målt op hvor motorakslen skulle være, og der blev lavet et hul i aluminiumspladen, således at motor-pulley'en kunne være der - de fire huller til skruerne blev boret og undersænket fra bagsiden, drivrenmmen blev lempet på plads og motoren skruet fast. Til sidst blev pladen skruet fast - midlertidigt med de to skruer der fastholder forpladen på lejehuset. Endelig blev de fem tilledninger fra motoren skruet fast i kronmuffen til driverprintet, og så var vi klar til at køre.
Vi fik fyret op under programmet - Flemming blev lidt overrasket, for det lignede ikke helt det program som han havde rodet med - det var i mellemtiden blevet modificeret. Nå, men han vidste dog hvordan man skulle starte, og det gjorde han så. Motoren kørte godt nok rundt, men knurrede underligt og trak en masse strøm - 6-7 Ampere mod de forventede ca. 300 mA!! Heldigvis kom der ikke røg, så vi var fortrøstningsfulde. Det må være programopsætningen mente Flemming - "fasen" - det er sgu nok den. Vi gik ind i konfigurationsfilen og fik rettet fasen fra "1" til "0", gemte filen og prøvede så igen.
Denne gang kørte det - stor glæde.
Når motoren tracker kører den i microstepmode, og det går ikke helt stille af sig - motoren kører med en pudsig ringen som er næsten umulig at dæmpe - dog kører drevet fint med en mindre forsyningsspænding, så man kan for at dæmpe støjen skrue spændingen ned fra 12-15 volt til omkring 6-7 volt, og så bliver støjen en del mindre.
De forskellige funktioner blev testet- drevet kunne scanne - indtil en vis hastighed, så stallede motoren. Ind i programmet igen for at rette endnu en parameter.
Så kørte det. Passede gearingen? Vi prøvede at køre 6 timer - det gjorde den ikke, så vi måtte til at regne, og endnu en programparameter blev rettet.
Til sidst kørte det helt hæderligt, og så skulle vi da også lige prøve at få "Guide" til at spille med. Bat-filen i styreprogrammet blev tilrettet, og Guide startede op på kommando. Et tilfældigt objekt (M31) blev valgt, der blev skiftet til styreprogrammet og koordinaten blev bekræftet med et tastetryk, hvorefter de to steppermotorer rampede op til max speed - ca. 1,5 grad/sec., rampede ned og stoppede på den rigtige position. Så valgte vi M33, og det gik også fint.
Vi er endnu ikke helt igennem R.A. drevets "bench-test", men indtil videre ser det ganske lovende ud.16-7-01
Deklinationsdrevet
Så var turen kommet til deklinationsdrevet. Vi var klar over, at vi skulle have et mekanisk design hvormed det var muligt at foretage små korrektioner således at præcis guiding var mulig.
Overgangen fra snekkehjul til tubus er vigtig, og man kan godt have sin tvivl mht. den mekaniske stabilitet, når deklinationsakslen "kun" er 15 mm tyk. Men dette problem er forholdsvis overkommeligt at løse, da man blot kan fastgøre snekkehjulet til tubus med et par skruer der fastholder snekkehjulet i den rigtige afstand vha. et par passende afstandsstykker.
Selve snekken til deklinationsdrevet er i messing. Den er lavet efter samme princip som R.A. snekken - gevindet er limet fast på den 8 mm tykke aksel.
Snekken skulle fastgøres til den ene gaffelarm. Der var i forvejen fire gevindhuller på den indvendige side af gaffelarmen og herpå skulle der så fastskrues en vinkelplade i aluminium. Jeg havde planlagt, at vinkelpladen skulle have en godstykkelse på 3 mm. men på vores ekskursion til jerngården fandt vi ikke materiale med den godstykkelse. I stedet fandt vi en profil med en godstykkelse på 4 mm. Det var nærmest en U-profil der desværre ikke var i 90 grader - den var en smule åben, så den skulle efterfølgende bankes på plads.
Det viste sig, at denne profil var i en særlig hård aluminiumslegering, så det var noget af en opgave at få den tilvirket i en 90 graders vinkel, men det lykkedes til sidst.
Vha. et snedigt afmarkeringssysten fik jeg meget nøjagtigt markeret, hvor hullerne i pladen skulle bores, og den blev så skruet fast med undersænkede skruer indvendig. Endvidere blev den også fastgjort på gaffelarmens forside med yderligere to skruer.
Jeg havde besluttet mig for, at snekkeakslen skulle kunne justeres i alle tre plan, således at den kunne komme i optimalt indgreb med snekkehjulet. Derfor indgår der en ekstra mekanisk del i denne opsætning. Snekkeakslen sidder i en holder der vha. fire skruer er fastgjort til en underliggende vinkel i forhold til hvilken den kan drejes en smule. Vinklen er fastgjort til vinkelpladen på gaffelarmen. Den underliggende vinkel kan justeres i højden således at snekken kan bringes i indgreb ved føre denne i radial retning.
Og hvordan kører det så? Jo, det kører tilsyneladende udmærket - indgrebet mellem snekke og snekkehjul er så præcist, at det reagerer prompte på den mindste drejning af snekken. Snekken kører jævnt uden nævneværdig friktionsmodstand. Systemet kan snildt vippe den nederste del af tubus op i en vinkel at 45 grader uden at der er tegn på mekanisk svaghed, så man må formode, at der heller ikke vil være problemer, når tubus er monteret i sin færdige konfiguration - hvor der naturligvis satses på balance.

{kind=link}